
Датчик угла колеса подключается 4 проводами - 2 провода к питанию (5-36v), 2 провода к CAN интерфейсу автопилота
Подключение осуществляется кабелем из комплекта автопилота

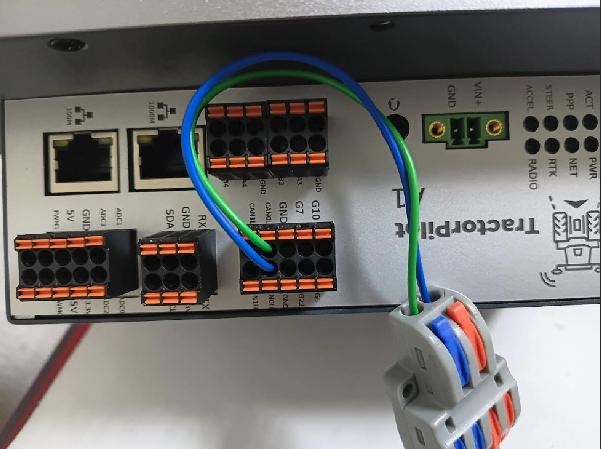
На кабелях чёрного цвета:
Красный провод: + питания
Чёрный провод - земля
Синий: CAN_H
Жёлто-зелёный: CAN_L
На более ранних кабелях белого цвета образца 2026(!!!) года:
Красный провод: + питания
Синий провод - земля
Чёрный: CAN_L
Жёлто-зелёный: CAN_H
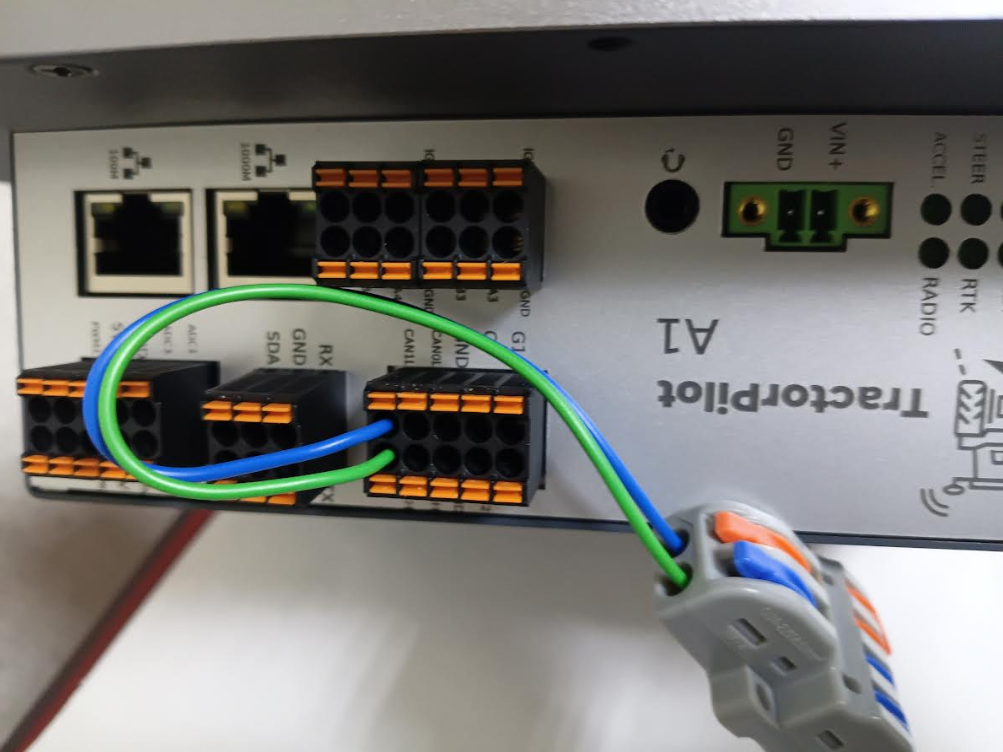
При использовании с BLDC мотором (круглый на рулевой вал) провода CAN_L, CAN_H кабеля датчика подключается к интерфейсу CAN0 автопилота через клеммник 2-4. В этот же клеммник вставляется CAN-интерфейс кабеля мотора
При использовании датчика вместе с дешёвым DC мотором (с шестернями) подключение осуществляется к интерфейсу CAN1 автопилота, либо напрямую, либо также через клеммник
Варианта установки датчика на трактор



Калибровка датчика угла колес
Перед началом использования Tractor Pilot проведите калибровку датчика угла колеса.
Нажмите значок "Трактор" в левом меню, выберите пункт "Настройка рулевой системы", потом нажмите кнопку "Калибровка датчика угла колес" и следуйте инструкциям на экране.
Подстройка датчика угла
После того, как настроены базовые параметры, необходимо подстроить другие параметры работы датчика. Перед выполнением этого шага убедитесь, что всегабаритные параметры тракторауказаны верно.
1. Уточнение нулевого положения датчика колеса. Установка точного нулевого положения датчика (положение при котором колеса стоят прямо, угол поворота ноль градусов) имеет важное значение для правильной работы автопилота. Очень важно, чтобы ноль был выставлен максимально точно. Для корректировки нуля нажмите кнопку "Подстройка датчика угла" в настройках рулевой системы, начните движения прямо.
Если наблюдаются отклонения от прямолинейного движения, добейтесь прямолинейного движения поворотом руля. Когда прямолинейность движения будет достигнута, в строке "Ноль датчика" кнопками +/- установите текущее значение датчика угла, которое отображается сверху панели настроек. Во время движения обратите внимание на курс, который отображается в верхнем меню - в случае прямолинейного движения значения курса будет колебаться около одного и того же значения.
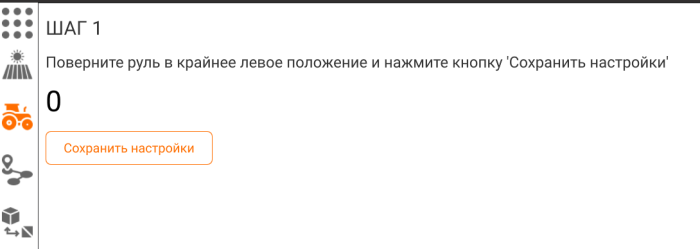
2. Определение истинных максимальных углов поворота. Максимальные углы могут отличаться от паспортных значений. Для проверки и установки максимальных правых и левых углов колеса, на котором установлен датчик колеса воспользуйтесь кнопкой "Проверка датчика угла" в настройках рулевой системы.
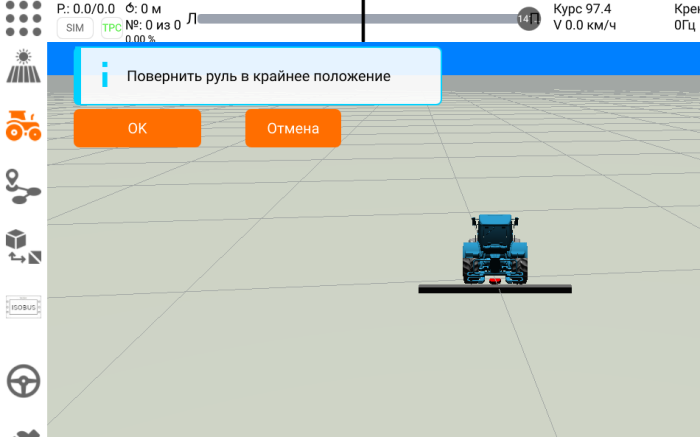
Поверните руль в крайнее правое положение, нажмите кнопку "OK" и после этого начните движение по кругу, дождавшись перехода GPS приемников в RTK режим
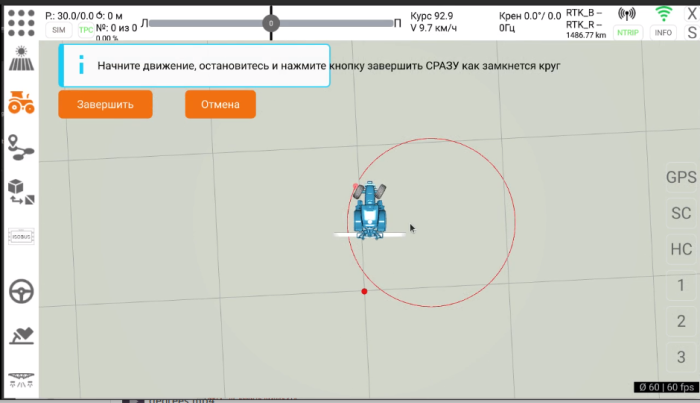
Когда круг замкнётся, остановитесь и нажмите кнопку "Завершить". Важно точно замкнуть круг, сильно не переезжая два раза по одному и тому же месту.
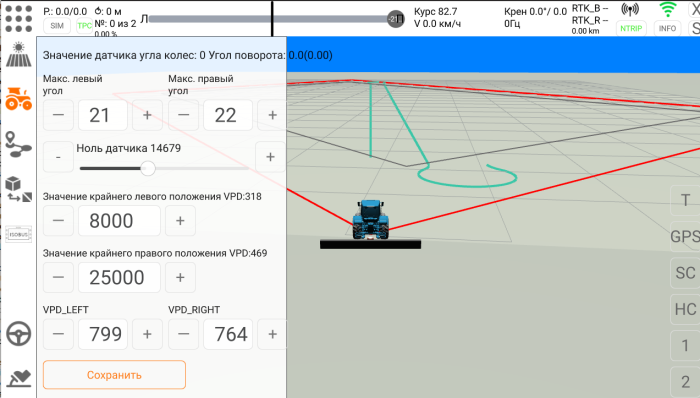
В информационном окне будет показан радиус поворота, истинный максимальный угол и другие параметры. Нажмите кнопку "Подстройка датчика угла" и внесите значение максимального правого угла.
Повторите процедуру для определения максимального левого угла.
Внесите значения максимальных углов в настройки в параметры "Максимальный левый угол", "Максимальный правый угол"
VPD
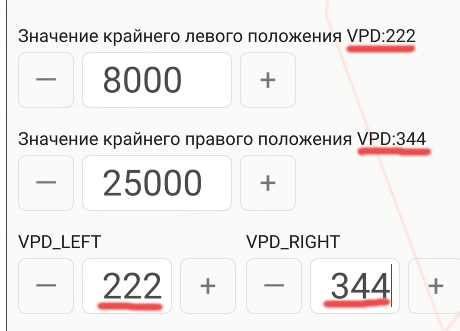
Перенесите значения VPD, указанные в заголовке значений крайних положений, в настройки VPD_LEFT, VPD_RIGHT. Это идеальные значения.
Во время работы идеальные значения нужно подстроить, но не больше, чем на 10-20%. Увеличение значений приводит к более интенсивной компенсации отклонения от траектории.