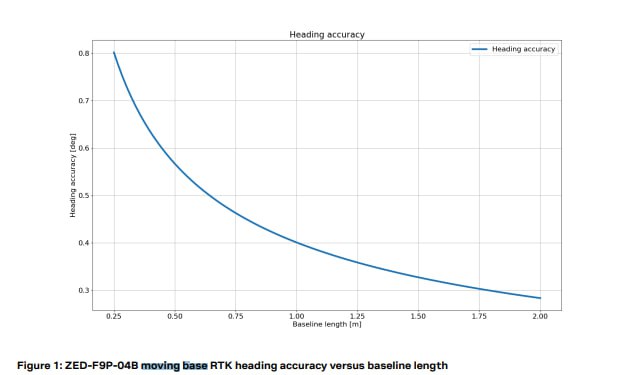
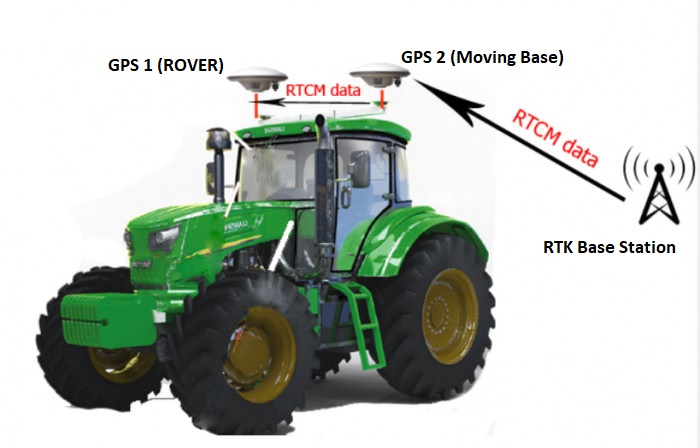
В Tractor Pilot углы направления движения и крена определяются без использования инерциального датчика - парой GPS приемников ublox F9P или одним GPS приемником с возможностью подключения двух антенн Comnav K922/Unicore UM982 (далее будет называть первый приемник Подвижной базой, а второй - Ровером), антенны которых равноудалены от поверхности земли и установлены на краях штанги, перпендикулярной оси симметрии трактора. Расстояние между антеннами называтеся Базовой линией. Минимальная длина базовой линии должна составлять не менее 1 метра. Чем длиннее базовая линия, тем выше точность определения угла направления, поэтому для монтажа антенн рекомендуется использовать балку длинной 1.5-2 метра. Зависимость погрешности в определении направления от длины базовой линии представлена на графике:
Рекомендованным навигационным модулем для использования с автопилотом Tractor Pilot является ГНСС приемник uBlox F9P с встроенной поддержкой RTK и USB портом - TP полностью поддерживает их бинарный протокол обмена данными UBX и имеет встроенное средство настройки этих приемников без использования стороннего программного обеспечения (uCenter не нужен).
В то же время можно подключить любой другой GPS приемник со встроенной поддержкой RTK режима, т.к в Tractor Pilot поддерживается стандартный текстовый протокол NMEA. Помимо USB интерфейсов TP предоставляет 3 свободных UART интерфейса для подключения навигационных модулей без USB порта
Подключение GPS приемников к Raspberry Pi и их настройка
Подключите навигационные модули к USB порту Raspberry Pi или к одному из 4 доступных на GPIO разъёме UART интерфейсов (рекомендуется подключать к UART), например так
GPS RaspberryPi (порт ttyAMA1)
RX GPIO 0
TX GPIO 1
GPS RaspberryPi (порт ttyAMA2)
RX GPIO 4
TX GPIO 5
GPS RaspberryPi (порт ttyAMA0)
RX GPIO 14
TX GPIO 15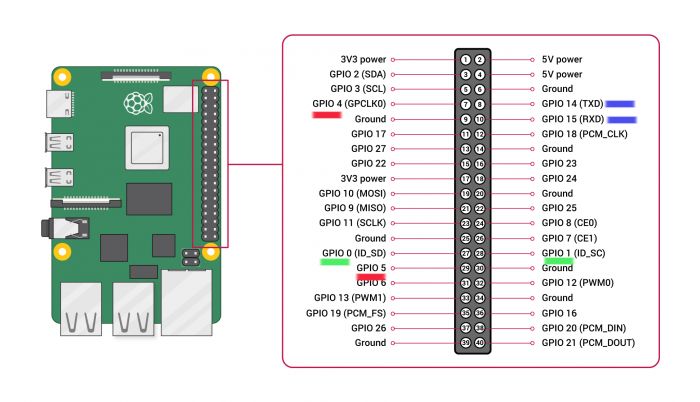
При подключении через UART GPS модули можно запитать от Raspberry Pi, соединив контакты 5V и GND модулей с контактами 5V и Ground на Raspberry Pi
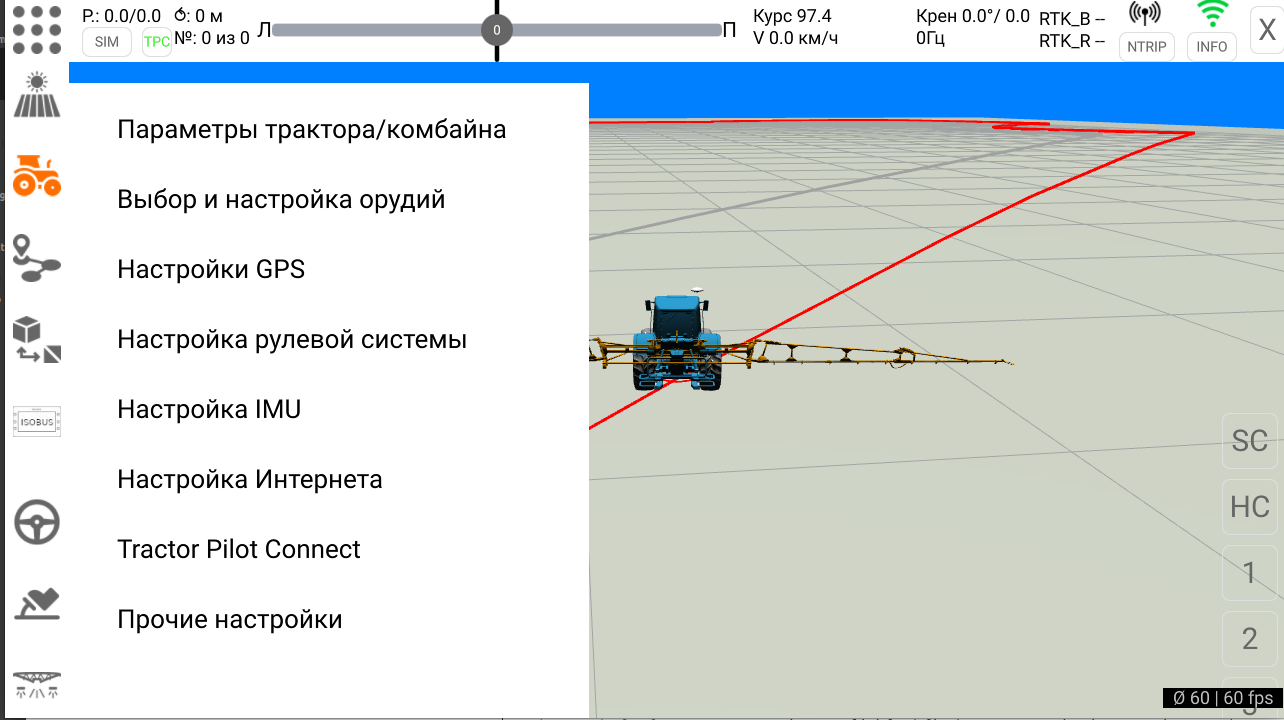
После подключения GPS приемника(ов) к Raspberry Pi нажмите иконку Трактор в левом меню и выберите пункт "Настойки GPS"
Конфигурация "Один GPS приемник"
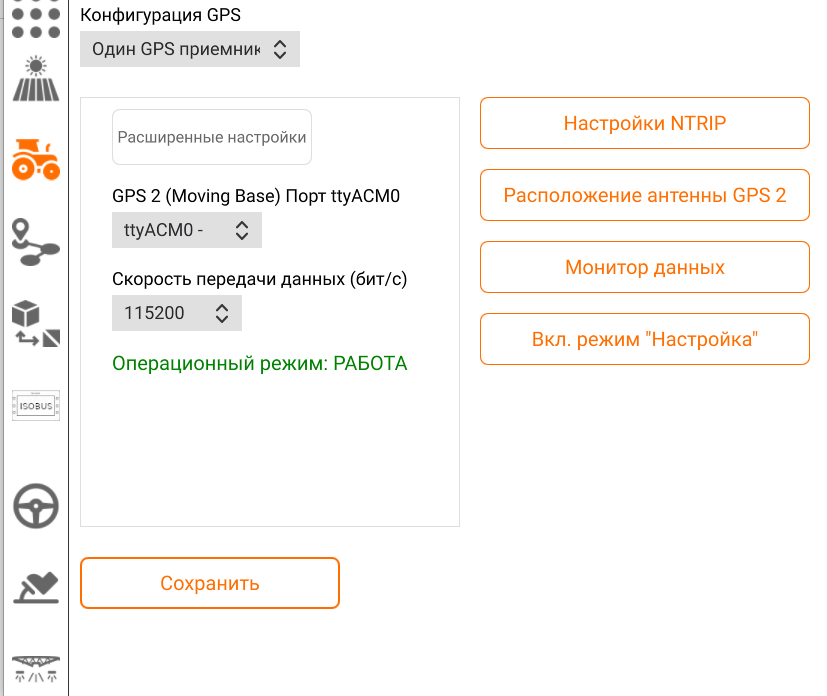
Выберите из списка Конфигурация GPS пункт "Один GPS приемник". Из списка портов выберите тот, к которому подключен GPS приемник. USB порты представлены устройствами вида ttyACMx, UART порты - ttyAMAx. Выберите скорость передачи данных (рекомендуемые значения - 921600). Нажмите кнопку "Сохранить" .
При подключении по UART заводские настройки скорости - 38400, соответственно при первом подключении приёмника нужно использовать эту скорость и после загрузки конфигурации из настроек поменять её на 921600.
Нажмите кнопку "Вкл. режим настройка" для перевода приемника в режим настройки. В строке "Операционный режим" значение "Работа" должно смениться на "Настройка". После этого нажмите кнопку "Расширенные настройки". Если настройки не прогрузились (поля пустые), нажмите кнопку "Назад" и затем снова "Расширенные настройки"
В строке Module Version указана версия прошивки GPS приемника (HPG 1.13). Для режима работы с двумя GPS приемниками рекомендуется использовать прошивку версии 1.13. Если на вашем приемники другая версия прошивки, рекомендуется прошить приемник на версию 1.13 - инструкции по прошивке представлены в конце данной статьи.
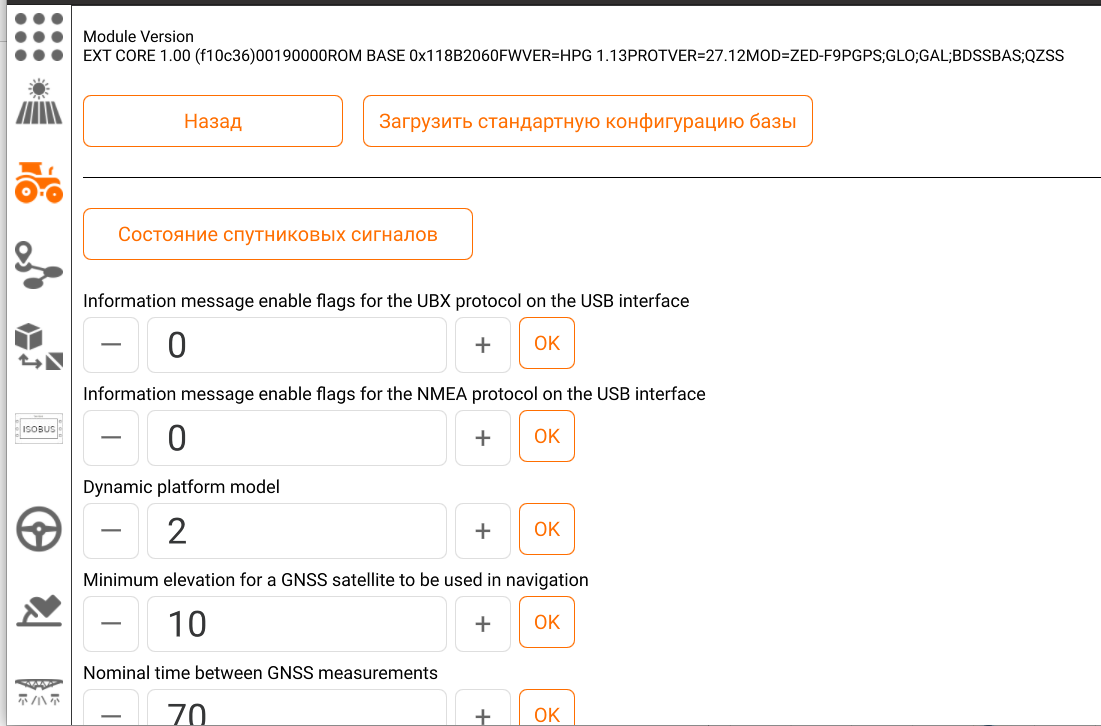
Нажмите кнопку "Загрузить стандартную конфигурацию". Нажмите кнопку "Расширенные настройки" ещё раз, чтобы убедиться, что конфигурация успешно применилась. Для этого долистайте страницу настроек до строки "UBX-NAV messages on USB" и убедитесь, что пунки PVT отмечен, а время навигационного решения (Nominal time between GNSS measurements) - 70мс

В верхней части страницы Расширенных настроек нажмите кнопку "Назад", а затем кнопку "Вкл. режим работа" - в строке "Операционный режим" значение "Настройка" должно смениться на "Работа". На этом настройка GPS приемника для одиночного режима завершена.
Нажмите кнопку "Монитор данных", выберите источник ZMQ GPS и нажмите старт. Если в мониторе данных вы видите строку примерно такую, как на картинке ниже, значит GPS приемник настроен правильно.

!!!После настройки навигационного модулянастройте прием навигационных поправок!!!
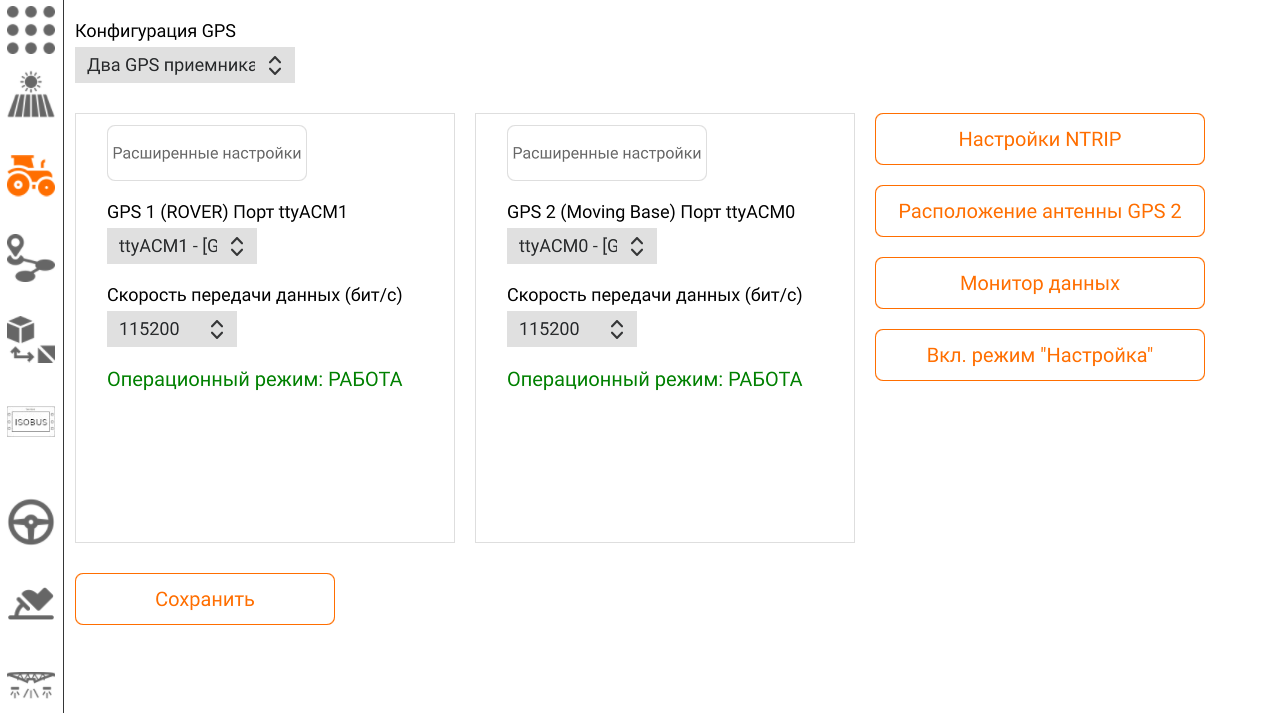
Конфигурация "Два GPS приемника"
Осуществите настройку первого приемника в режиме "Одиночного GPS".
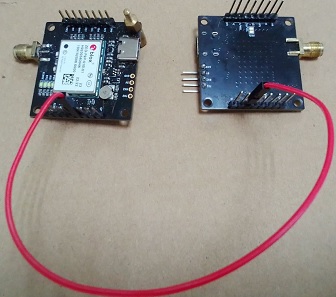
Соедините проводом пин TX2 приемника GPS_2(Moving Base) с пином RX2 приемника GPS_1(ROVER).
В списке Конфигурация GPS выберите вариант "Два GPS приемника". После этого появится возможность настройки второго GPS приемники (GPS 1 Rover). Осуществите его настройку аналогично настройке первого приемника. После загрузки конфигурации во второй приемник (GPS1 Rover) зайдите в расширенные настройки и убедитесь, что конфигурация успешно загрузилась - в блоке"UBX-NAV messages on USB" должна быть отмечена опция RELPOSNED,а время навигационного решения (Nominal time between GNSS measurements) - 70мс

ПОСЛЕНА СМЕНЫ КОНФИГУРАЦИИ С ОДИНОЧНОЙ НА ДВОЙНУЮ (И НАОБОРОТ) НЕОБХОДИМА ПЕРЕЗАГРУЗКА
Как ранее было указано 2 GPS заменяют инерциальный датчик, но некоторые настройки всё равно производятся в разделе "Настройки IMU", в частности включение/выключение компенсации крена и выставление нуля крена.
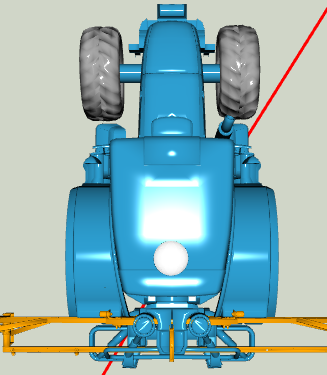
Установка GPS антенн
Если используется один GPS приемник, то крайне рекомендуется располагать антенну на крыше, над центром задней оси трактора или над центром передней оси комбайна. После установки антенны необходимо нажать кнопку "Расположение антенны GPS" и ввести высоту установки антенны от уровня земли и её смещение в поперечном (отрицательное смещение - влево) и продольном направлении (отрицательное смещение - назад) от центра задней оси (если такое смещение присутствует)
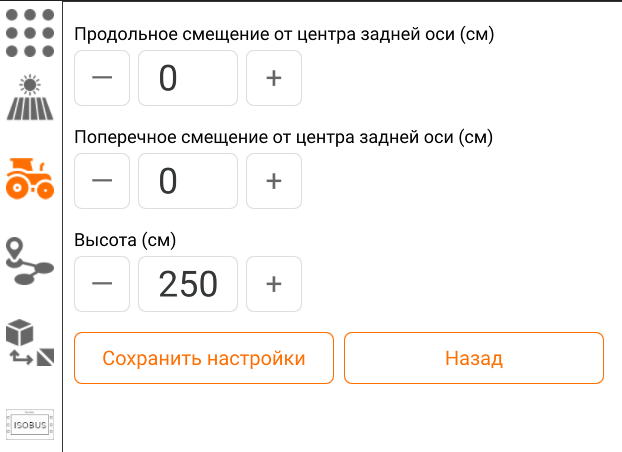
Примерное расположение антенны будет визуализировано на модели трактора
При использовании двух GPS рекомендуется располагать центр штанги с антеннами над центром задней оси трактора или цетром передней оси в случае установки на комбайне. Антенна приемника Moving Base должна располагаться слева, Rover - справа. В настройках положения антенны задается только положение антенны Moving Base. Угловое смещение в настройках выставить -90 градусов, если антенны выставлены идеально перпендикулярно оси. Это важный параметр - если во время работы трактор не выходит на линию, подкорректируйте эти значение кнопками +/-, чтобы поймать точный угол.
Рекомендованные версии прошивки навигационных модулей uBlox F9P
Рекомендованная версия прошивки - 1.13
Скачать прошивку v.1.13 для u-blox F9P
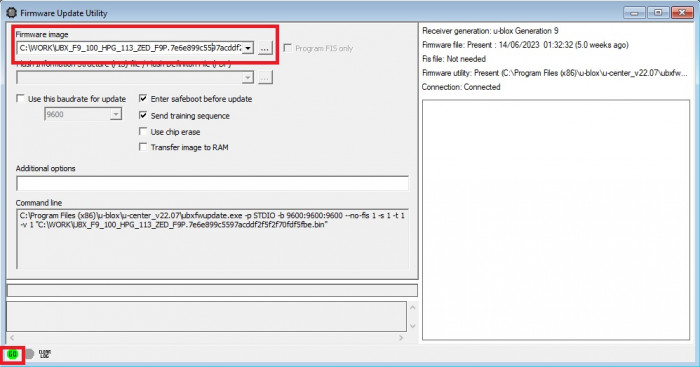
Прошивка может быть осуществлена в программном обеспечении uCenter от производителя uBlox.Скачать U-Center
Запустите uCenter, в верхнем меню выберите настройку Tools - Firmware Update . Выберите файл прошивки и нажсите кнопку "Go"
Если приёмник подключен к компьютеру по USB, не отмечайте пункт "Enable safeboot before update"
Просмотр состояния спутниковых сигналов
Для просмотра состояния спутниковых сигналов сообщение SIG должно быть включено в "Расширенных настройках"

Нажмите кнопку GPS справа на главном экране приложения
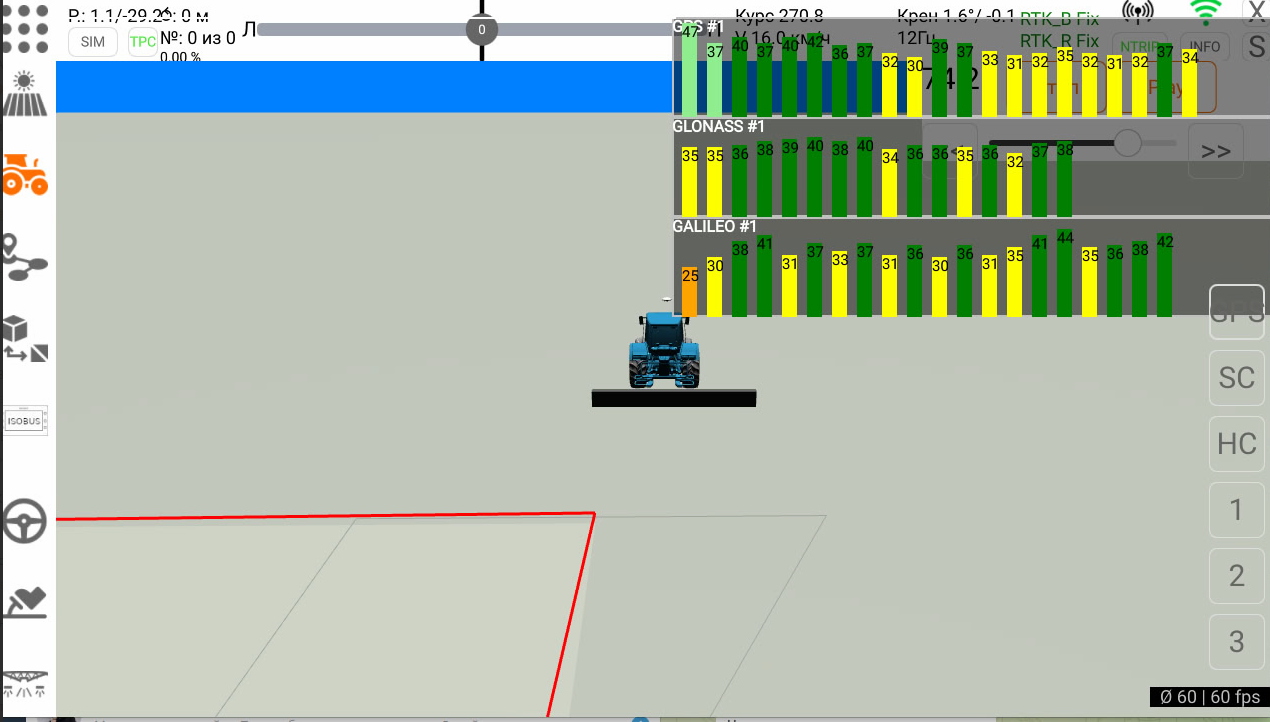
Спутниковые сигналы для каждой из активных спутниковых систем представлены в виде гистограм. Высота столбика и цвет характеризуют качество принимаемых спутниковых сигналов, цифра - величина С/No , соотношение мощности полезного сигнала к шуму. Нормальным для работы считается уровень С/No выше 35.
Цвета:
оранжевый - очень плохой уровень сигнала, не участвует в рассчёте положения
жёлтый - плохой уровень сигнала, непригоден для рассчёта RTK-режима
светлозелённый - хороший уровень сигнала
зелёный - хороший уровень сигнала и для этого сигнала поступают RTK поправки
Для режима RTK fix необходимо наличие 5-8 зелёных столбиков