Поддерживается два типа датчиков угла колеса:
- Цифровой датчик угла с CAN-интерфейсом (рекомендуемый вариант)
- Аналоговый датчик, подключаемый через внешний АЦП-модуль к Raspberry Pi
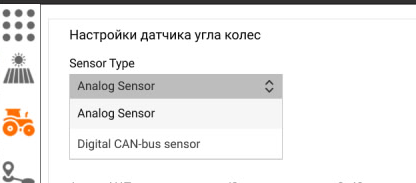
Тип датчика выбирается в настройках
Цифровой датчик угла колеса

Линии CAN_H, CAN_L датчика подключаются к CAN-адаптеру.Напряжение питания VCC 5-16V. Схема разъёма подключения датчика:

Аналоговый датчик угла колеса
В компьютерах Raspberry Pi отсутствует встроенный аналогоцифровой преобразователь (АЦП), поэтому датчик угла подключается через внешний АЦП, соединенный с Raspberry Pi через i2c интерфейс. В качестве внешнего АЦП в Tractor Pilot используется 16 битный АЦП ADS1115
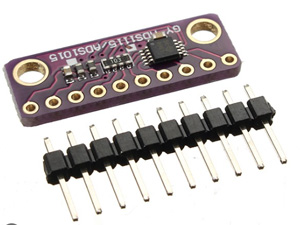

Схема подключения аналогового датчика
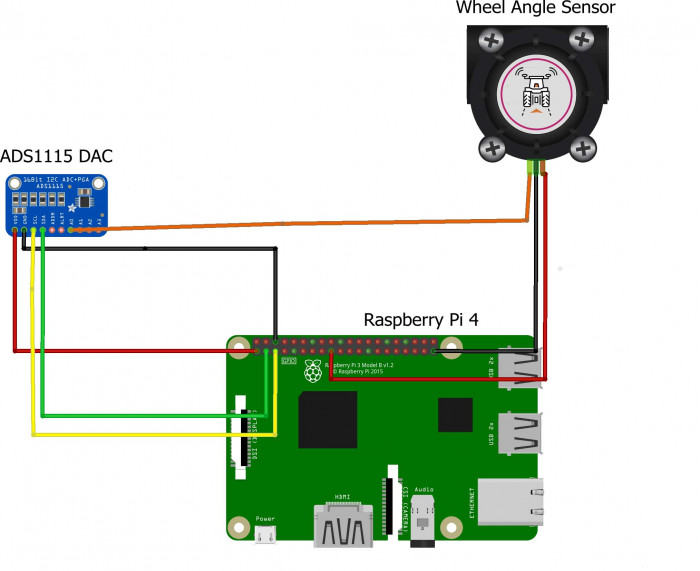
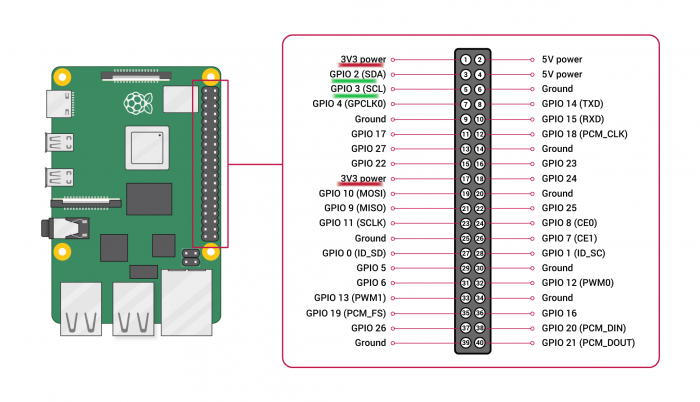
ADC SDA - RPi SDA (GPIO 2)
ADC SCL - RPi SCL (GPIO 3)
ADC Vcc - RPi 3.3V
ADC GND - любой GND пин RPi
ADC Вход 0 (A0) - Сигнальная линия датчика
Питание датчика (Vcc) - RPi 3.3V
Земля датчика (GND) -любой GND пин RPiНастройка датчика угла колеса
Нажмите значок Трактор в левом меню и выберите пункт "Настройка рулевой системы"
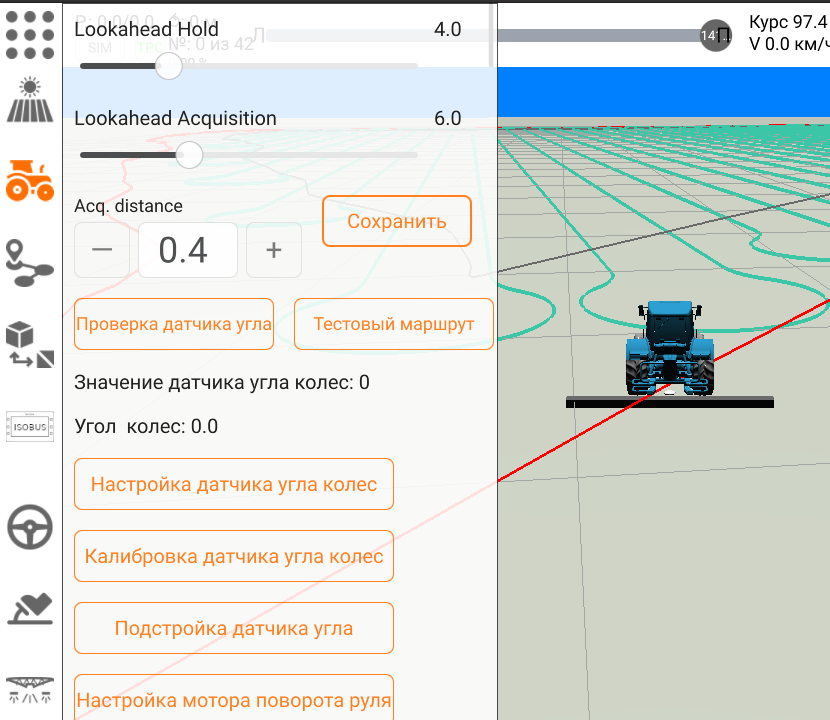
Нажмите кнопку "Настройка датчика угла колес"
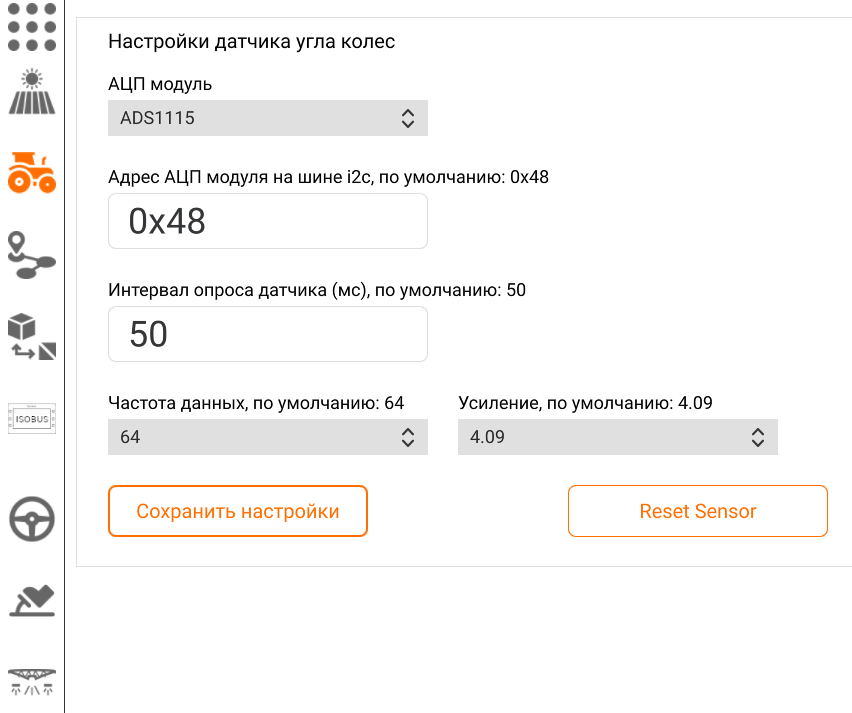
Выберите модель АЦП-модуля, и введите адрес модуля на шине i2с (для ads1115 по умолчанию 0x48).
Интервал опроса датчика должен быть немного выше, чем частота навигационного решения GPS датчика. Если частота навигационного решения 15Гц (максимум для F9P в режиме RTK с несколькими спутниковыми системами), установите интервал опроса 50мс.
Усиление выбирается в зависимости от выходного напряжения сигнальной линии датчика угла. Для 3.3В выбирайте значение 4.09, для 5v - 6.14
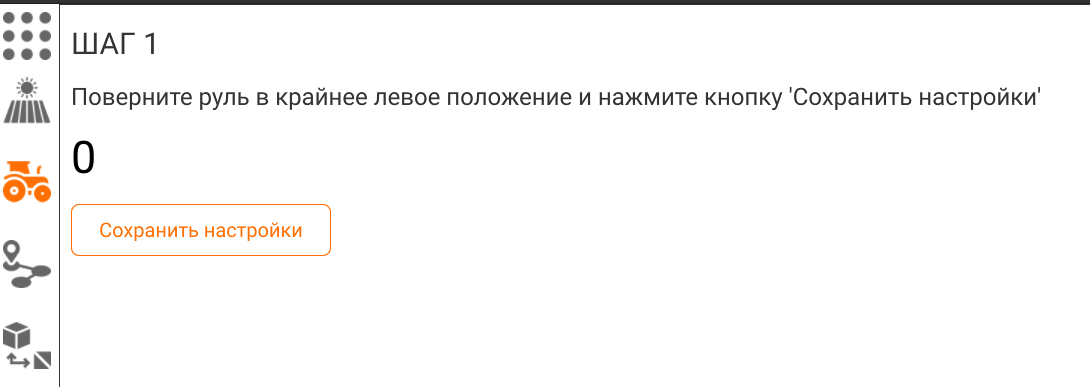
Калибровка датчика угла колес
Перед началом использования Tractor Pilot проведите калибровку датчика угла колеса.
Нажмите значок "Трактор" в левом меню, выберите пункт "Настройка рулевой системы", потом нажмите кнопку "Калибровка датчика угла колес" и следуйте инструкциям на экране.
Проверка работы
Если датчик настроен верно, то во время поворота руля колеса на модели трактора в приложении будут также поворачиваться в правильную сторону.
В левом верхнем углу отображается текущий угол (25) поворота колес
На странице"Настройка рулевой системы" также отображается сырое значение с датчика угла колеса и реальный угол поворота, рассчитанный с учетом калибровки
Подстройка датчика угла
После того, как настроены базовые параметры, необходимо подстроить другие параметры работы датчика. Перед выполнением этого шага убедитесь, что все габаритные параметры трактора указаны верно.
1. Уточнение нулевого положения датчика колеса. Установка точного нулевого положения датчика (положение при котором колеса стоят прямо, угол поворота ноль градусов) имеет важное значение для правильной работы автопилота. Очень важно, чтобы ноль был выставлен максимально точно. Для корректировки нуля нажмите кнопку "Подстройка датчика угла" в настройках рулевой системы, начните движения прямо.
Если наблюдаются отклонения от прямолинейного движения, добейтесь прямолинейного движения поворотом руля. Когда прямолинейность движения будет достигнута, в строке "Ноль датчика" кнопками +/- установите текущее значение датчика угла, которое отображается сверху панели настроек. Во время движения обратите внимание на курс, который отображается в верхнем меню - в случае прямолинейного движения значения курса будет колебаться около одного и того же значения.
2. Определение истинных максимальных углов поворота. Максимальные углы могут отличаться от паспортных значений. Для проверки и установки максимальных правых и левых углов колеса, на котором установлен датчик колеса воспользуйтесь кнопкой "Проверка датчика угла" в настройках рулевой системы.
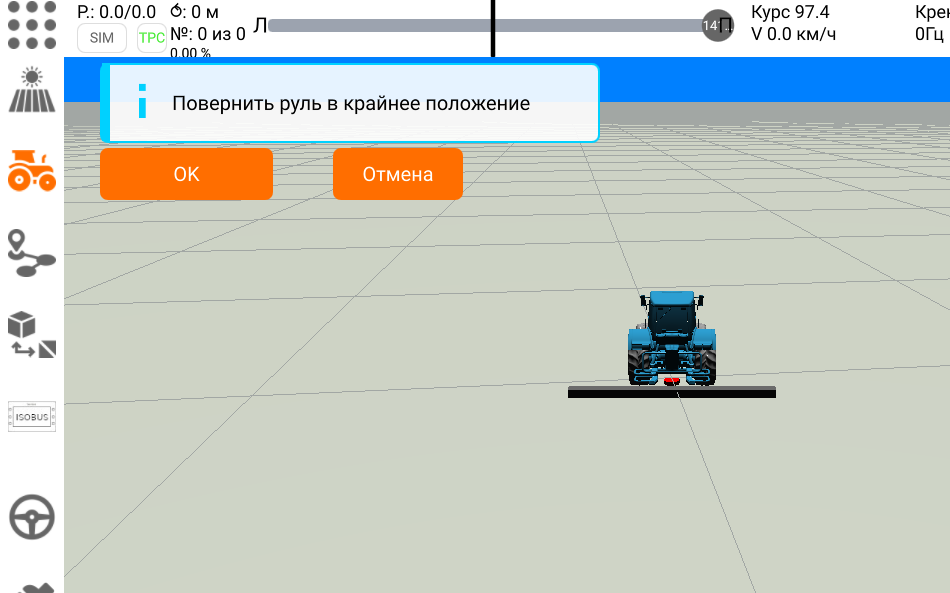
Поверните руль в крайнее правое положение, нажмите кнопку "OK" и после этого начните движение по кругу, дождавшись перехода GPS приемников в RTK режим
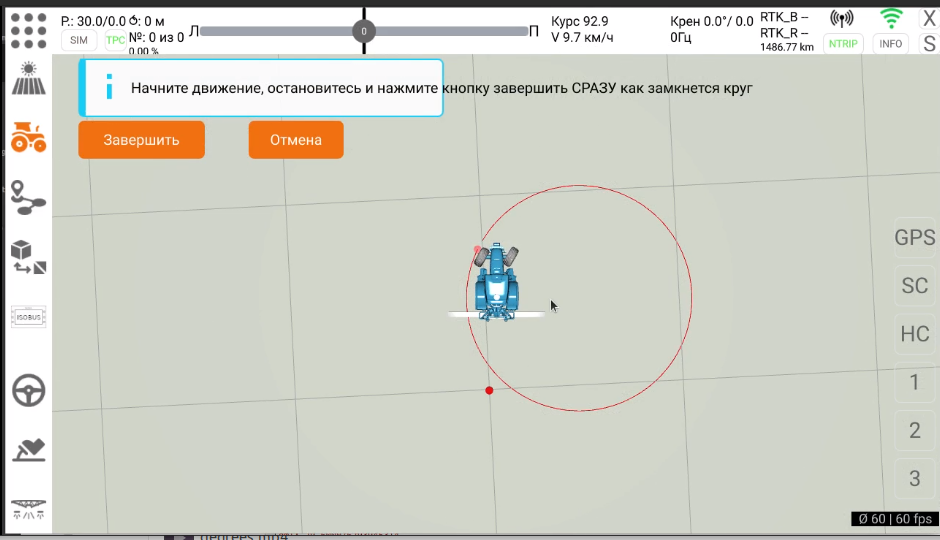
Когда круг замкнётся, остановитесь и нажмите кнопку "Завершить". Важно точно замкнуть круг, сильно не переезжая два раза по одному и тому же месту.
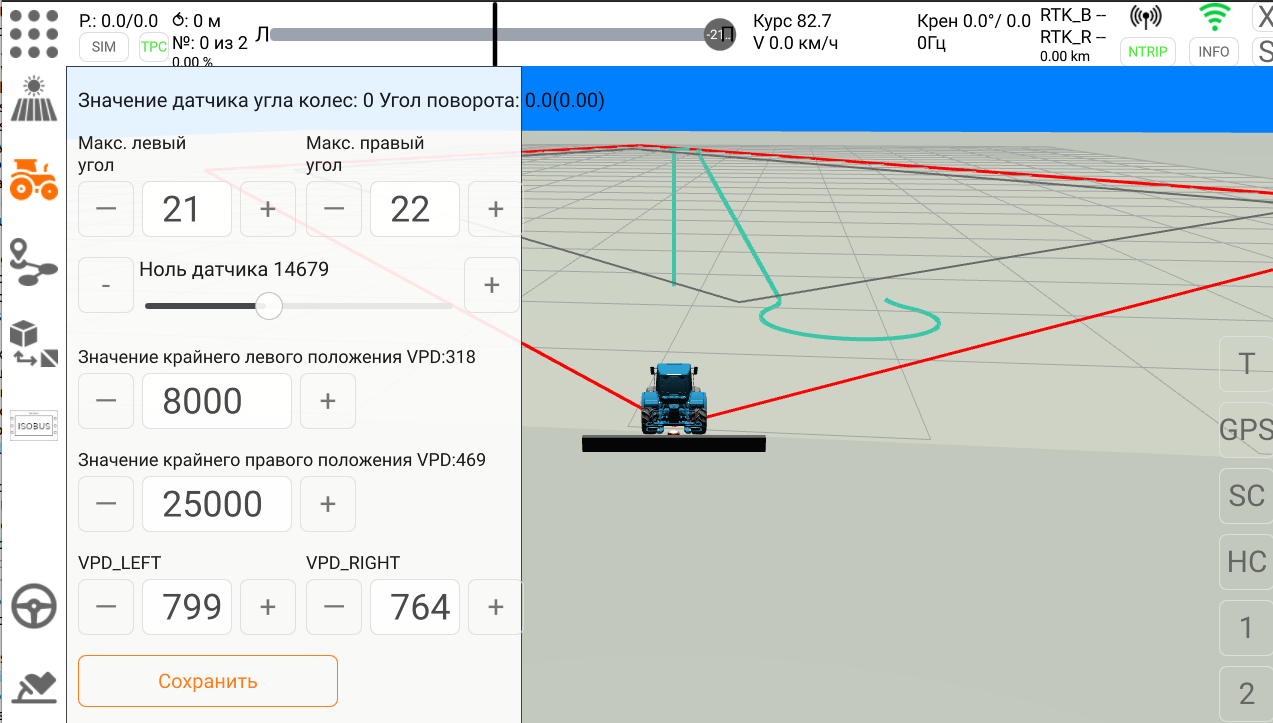
В информационном окне будет показан радиус поворота, истинный максимальный угол и другие параметры. Нажмите кнопку "Подстройка датчика угла" и внесите значение максимального правого угла.
Повторите процедуру для определения максимального левого угла.
Внесите значения максимальных углов в настройки в параметры "Максимальный левый угол", "Максимальный правый угол"
VPD
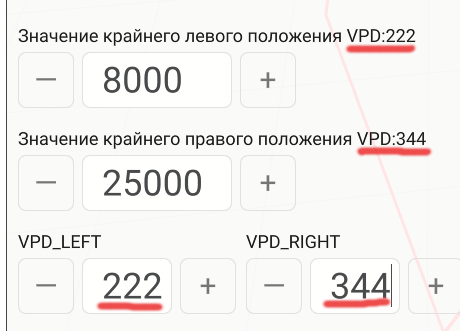
Перенесите значения VPD, указанные в заголовке значений крайних положений, в настройки VPD_LEFT, VPD_RIGHT. Это идеальные значения.
Во время работы идеальные значения нужно подстроить, но не больше, чем на 10-20%. Увеличение значений приводит к более интенсивной компенсации отклонения от траектории.