Tractor Pilot больше не поддерживает инерциальные датчики. Используйте вариант с 2 GPS антеннами.
В случае использования конфигурации "Одиночный GPS" углы направления и крена определяются при помощи инерциального датчика (IMU). В автопилоте Tractor Pilot используется инерциальный датчик BNO 085
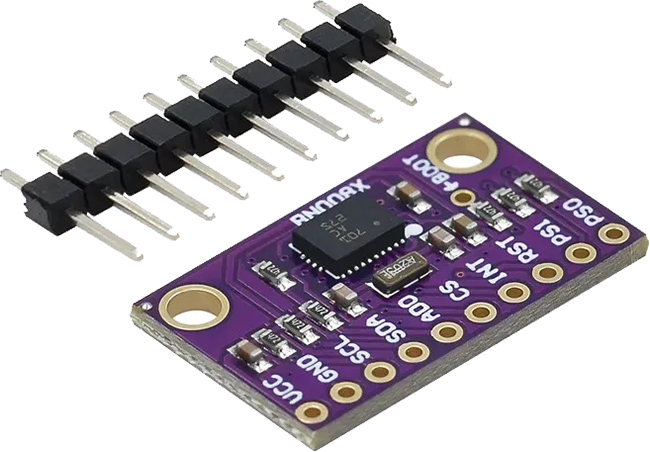
IMU датчик BNO 085 может работать в двух основных режимах - обычный режим при подключении к i2c интерфейсу Raspberry Pi, режим RVC при подключении к UART. Оба режима поддерживаются программным обеспечением Tractor Pilot
Подключение
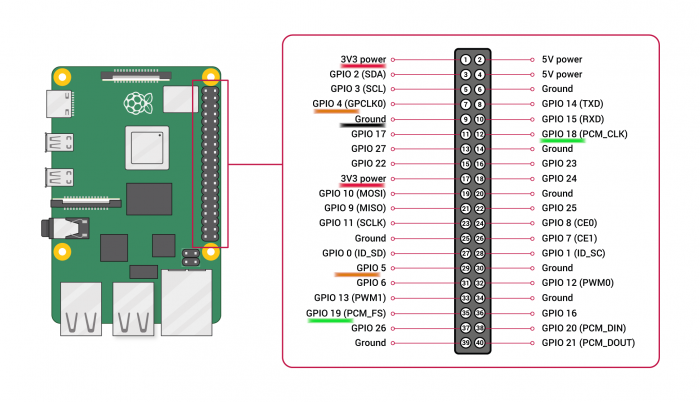
Для работы в обычном режиме подключите инерциальный датчик BNO085 к i2c интерфейсу компьютера Raspberry Pi. По умолчанию используется интерфейс I2C-3 (линия SDA на пине GPIO18, линия SCL на пине GPIO19). Полная схема подключения выглядит так:
BNO-085 SDA - RPi SDA-3 (GPIO 18)
BNO-085 SCL - RPi SCL-3 (GPIO 19)
BNO-085 VCC - 3v3 Power
BNO-085 GND - любой GND пин Для работы датчика в режиме RVC подключите его к интерфейсу UART-3 (/dev/ttyAMA2) или любому другому UART интерфейсу, пин PS0 датчика должен быть подключен к 3.3V. Схема подключения для RVC режима выглядит так:
BNO-085 SDA/TX - RPi RX-3 (GPIO 5)
BNO-085 SCL/RX - RPi TX-3 (GPIO 4)
BNO-085 VCC - 3v3 Power
BNO-085 PS0 -3v3 power
BNO-085 GND - любой GND пинНастройка
Нажмите иконку Трактор в левом меню и выберите пункт "Настройка IMU"
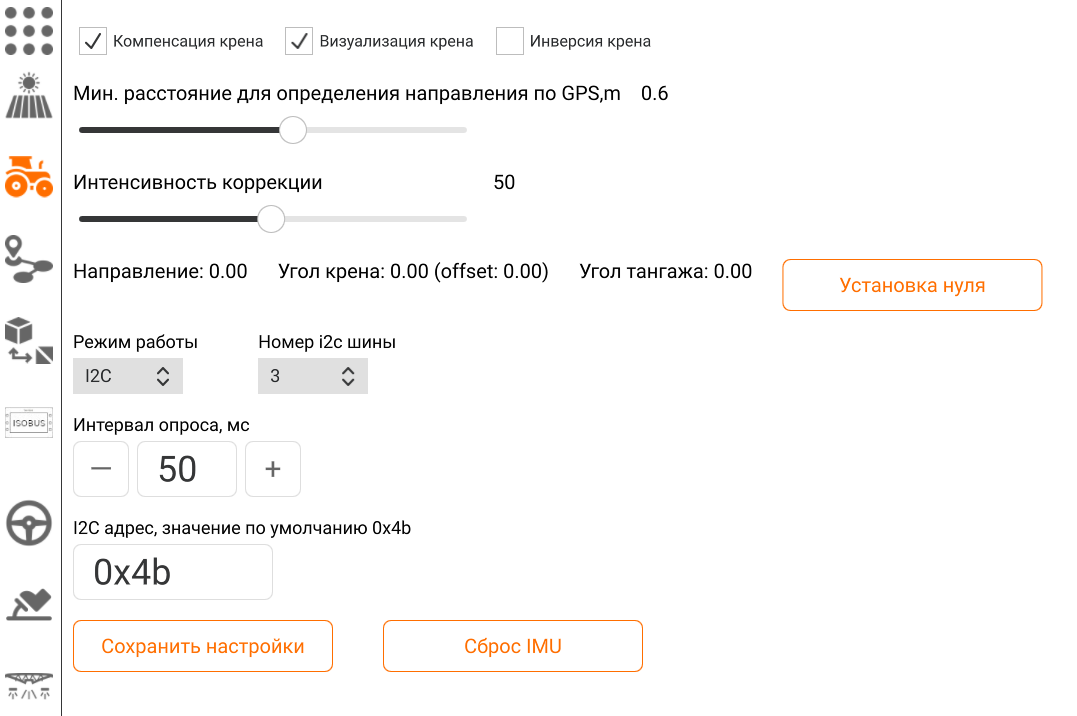
Сначала выберите режим работы (I2C или UART RVC) и интерфейс передачи данных. Если вы следуете схеме подключения, описанной в данном документе, выберите номер i2c шины 3 в случае использования обычного режима и порт ttyAMA2 в случае использования режима RVC. i2c адрес по умолчанию у датчика BNO085 - 0x4b.
Интервал опроса датчика должен быть немного выше, чем частота навигационного решения GPS датчика. Если частота навигационного решения 15Гц (максимум для ublox F9P в режиме RTK с несколькими спутниковыми системами), установите интервал опроса 50мс.
Компенсация крена - отметьте эту настройку, чтобы включить режим коррекции положения на наклонных поверхностях.
Визуализация крена - если эта настройка включена, то модель трактора в приложении будет наклоняться на углы, соответствующие углам крена с IMU датчика. Если во время реальной работы визуализация крена ухудшает производительность приложения (падает параметр FPS), отключите этот параметр
Инверсия крена . По умолчанию отрицательные углы соответствуют кренам влево, положительные - вправо. Если датчик установлен так, что положительные углы соответствуют левому крену, то отметьте эту настройку.
Установка нуля. Установка новой точки нулевого крена для компенсация крена установки, если датчик выставлен не идеально ровно. Встаньте на ровной поверхности и нажмите эту кнопку.