Чтобы построить DIY-автопилот для трактора (комбайна или иной сельхозтехники) из компьютера Raspberry Pi, потребуются следующие компоненты (актуальные ссылки на покупку размещены на форуме) :
1. Компьютер Raspberry Pi 5 с 2-4 ГБ RAM с картой памяти microSD class 10 объёмом 8-32 ГБ
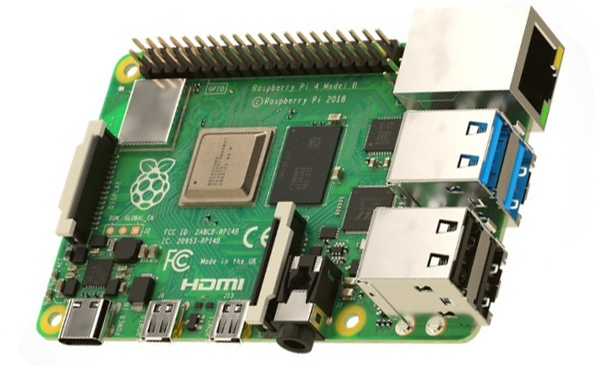
Raspberry Pi 4 также поддерживается, но рекомендуется использовать именно 5-ю модель - она современнее и в 3 раза мощнее.
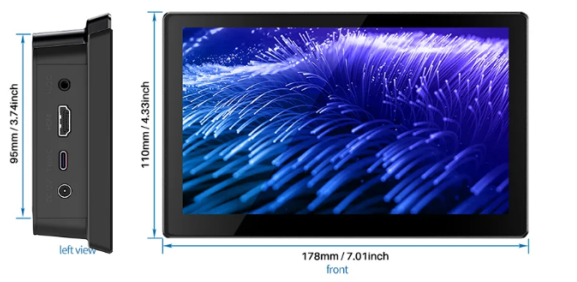
2. Сенсорный экран 10.1 с корпусом для установки компьютера Raspberry Pi

3. Два GPS приемника uBlox F9P или один двухантенный приемник Comnav K922 / Unicore UM982
Благодаря такой конфигурации направления и крены определяются без использования инерциального датчика.
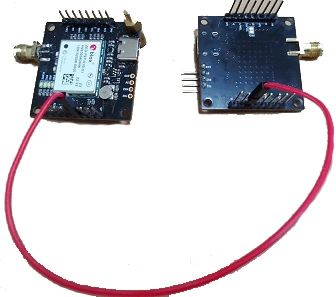

4. Мультидиапазонная GPS антенна 2шт

5. Датчик угла поворотных колес
Вариант 1 (рекомендуемый) - цифровой с CAN интерфейсом

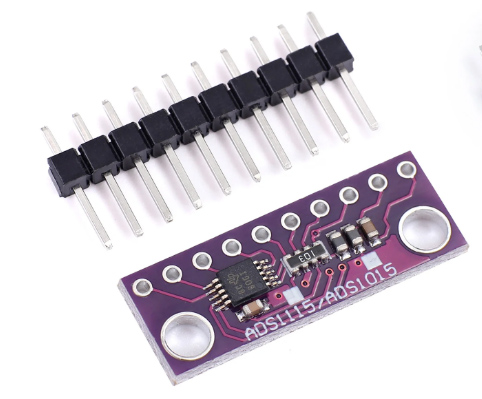
Вариант 2 - аналоговый датчик, подключается через АЦП

Поскольку в Raspberry Pi отсутствует встроенный АЦП подключение аналогового датчика угла (Вариант 2) колес осуществляется через внешний АЦП. Для подключения цифрового датчика угла колеса (Вариант 1) АЦП не требуется
6. Внешний электромотор для вращения руля или рулевого вала
Могут использоваться 2 типа электромоторов:
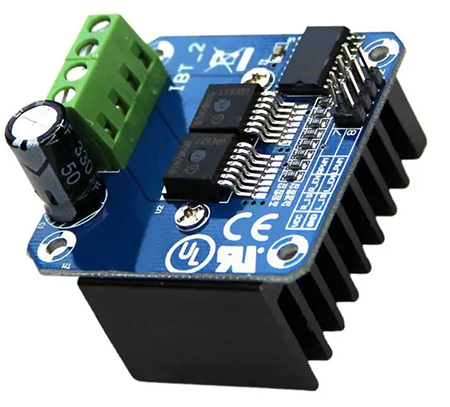
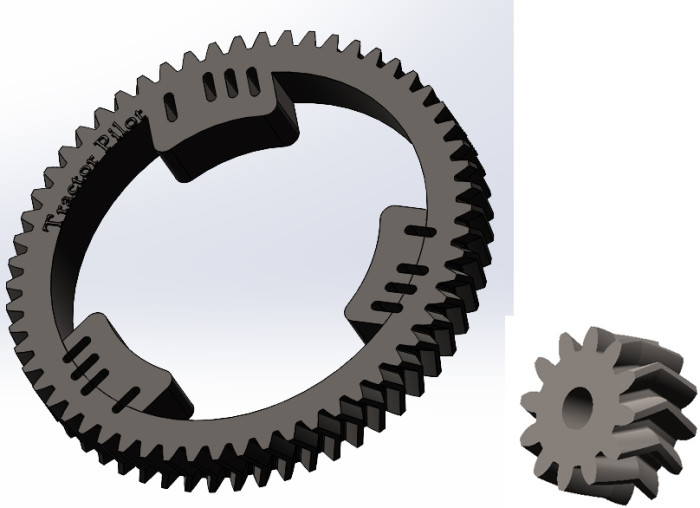
1. Недорогие DC моторы с парой шестерней (одна на вал электромотора, вторая - на руль) , подключаемые через драйвер мотора.
2. Дорогой BLDC мотор с отверстием под рулевой вал
Мотор 1:

Драйвер мотора:
Шестерни:
Мотор 2:

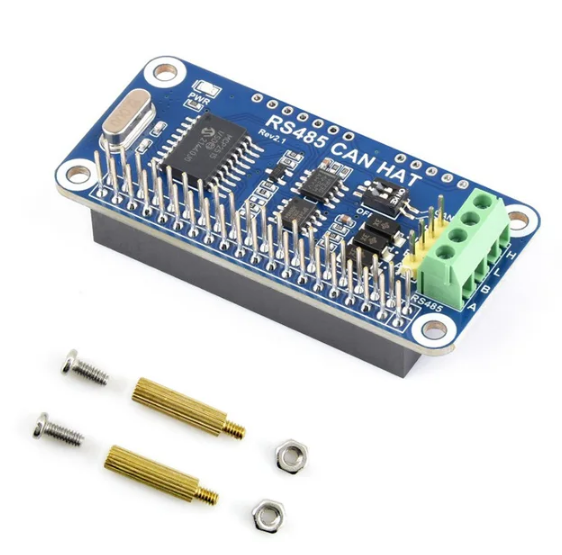
7. Адаптер USB-CAN для подключения к ISOBUS (опционально), а также мотора и датчика угла колеса с CAN-интерфейсом

или GPIO модуль
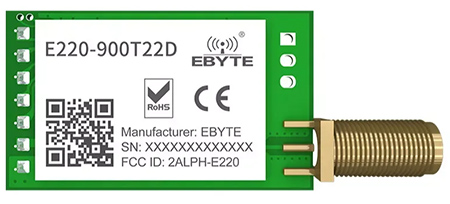
8. Радиотрансивер LoRa (опционально)
9.Провода соединительные
Для подключения модулей к компьютеру Raspberry Pi удобно использовать соединительные провода для штырьков с шагом 2.54 мм
