Для автоматического управления рулением установите внешний электромотор. Существует два основных типа электромоторов для этой задачи - недорогие коллекторные DC 12-24В моторы (требуют дополнительно зубчастое колесо на руль и шестерню на вал электромотора), дорогие бесколлекторные BLDC моторы с отверстием под рулевой вал.
Получить быструю экспертную консультацию по вариантам монтажа мотора в конкретных моделях сельхозтехники можно в сообществе пользователей Tractor Pilot в Telegram
Подключение DC мотора

DC мотор подключается к Raspberry Pi через плату драйвера мотора. От RasPi на драйвер мотора поступает ШИМ-сигнал для регулировки скорости вращения и сигнал выбора направления вращения (влево/вправо), в зависимости от этих сигналов драйвер формирует необходимое выходное напряжение для электромотора, который подключен к драйверу.
Tractor Pilot поддерживает 2 типа драйверов - IBT-2 и Cytron MD13S.
Cytron MD13S подключается к Raspberry Pi тремя проводами:
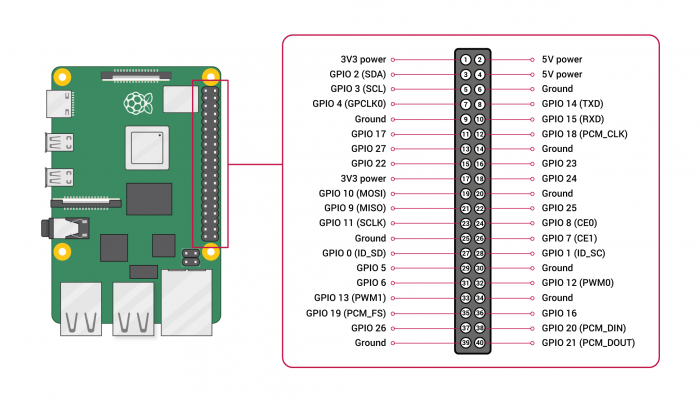
Драйвер Cytron RaspberryPi
DIR GPIO 26
PWM GPIO 13
GND любой GND пин
К клеммному разъёму +/- драйвера подключается бортовое питание 12В, к разъёмам MA/MB драйвера подключается электромотор.
Подключение драйвера IBT-2:
Драйвер IBT2 RaspberryPi
L_EN, R_EN, VCC 5V
RPWM GPIO 13
LPWM GPIO 12
GND любой GND пинНастройка DC мотора
Для настройки мотора нажмите значок Трактор в левом меню и выберите пункт "Настройка рулевой системы", далее кнопку "Настройка мотора поворота руля"
Пропорциональный коэффициент определяет "агрессивность" работы мотора. Мощность, с которой включается мотор для компенсации ошибки позиционирования, пропорциональна разнице между текущим углом колеса и тем, который необходимо установить для того, чтобы остаться в пределах траектории. Если нужно повернуть колесо на 5 градусов, то при пропорциональном коэффициенте 10, мотор включится на 50% (5x10) мощности. Коэффициент подбирается экспериментальным путём.
Максимальная мощность - максимальная мощность, с которой будет включаться мотор. Даже если рассчитанная при помощи пропорционального коэффициента мощность будет превышать данное значение, мотор не включиться с мощностью превышающей данное значение.
Минимальная мощность - минимальная мощность, необходимая для того, чтобы мотор начал вращать колесо. В блоке "Проверка мотора" выбирайте из списка мощности от 0 до значения, когда мотор начнёт минимальное вращение и вправо, и влево. Установите данное значение как минимальную мощность
Максимальная мощность для малых углов - мощность, которая не может быть превышена при необходимости поворота колёс на малые углы (0-3 градуса)
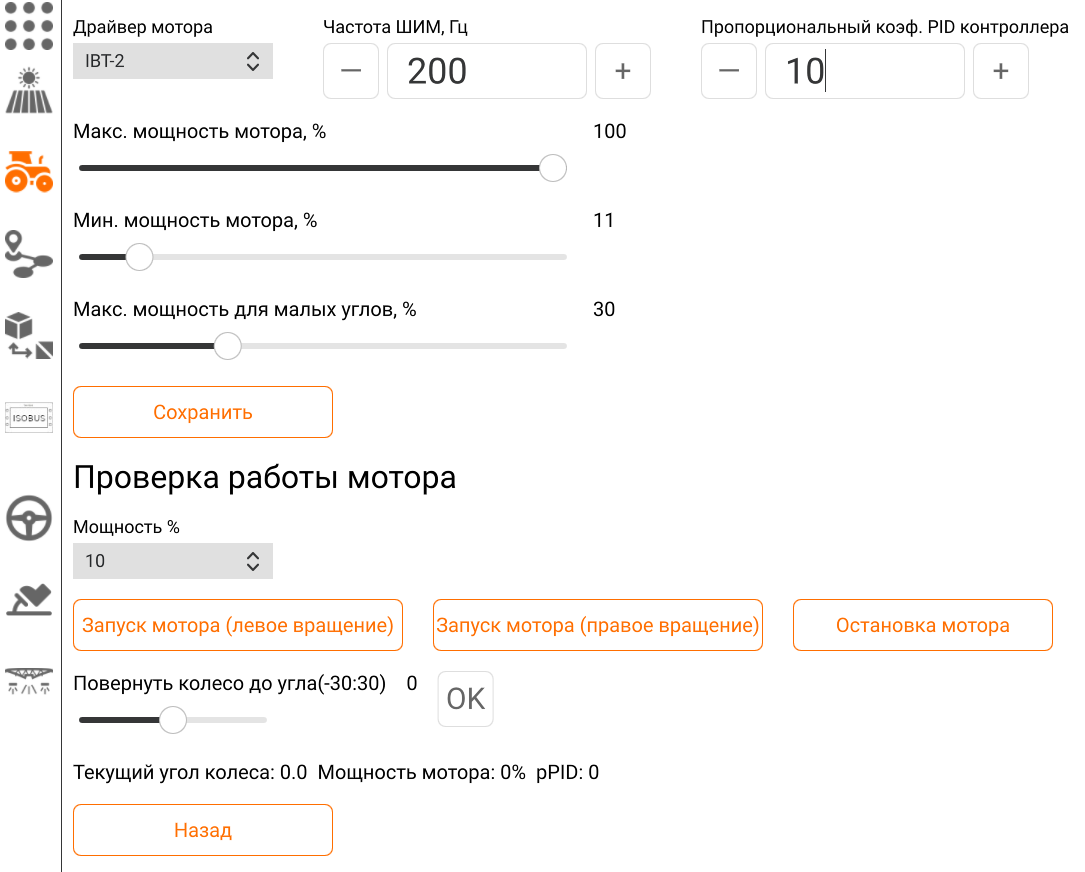
Проверка мотора
Выбирайте разные значения мощности и проверьте корректность направления вращения. При нажатии на кнопку "Левое вращение" мотор должен вращать руль влево, "Правое вращение" - вправо. Кнопка "Остановка мотора" должна останавливать мотор.
Если датчик угла верно настроен, то мотор должен поворачивать колеса до угла, выбранного в слайдере "Повернуть колесо" (отрицательный угол - поворот колёс влево)
Подключение BLDC-мотора

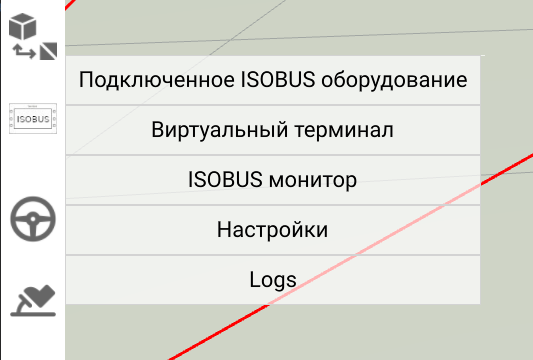
Перед подключением такого мотора активируйте в настройках CAN-шину и включите её автоматический запуск после загрузки. Для этого в левом меню нажмите значок ISOBUS и выберите пункт "Настройки"
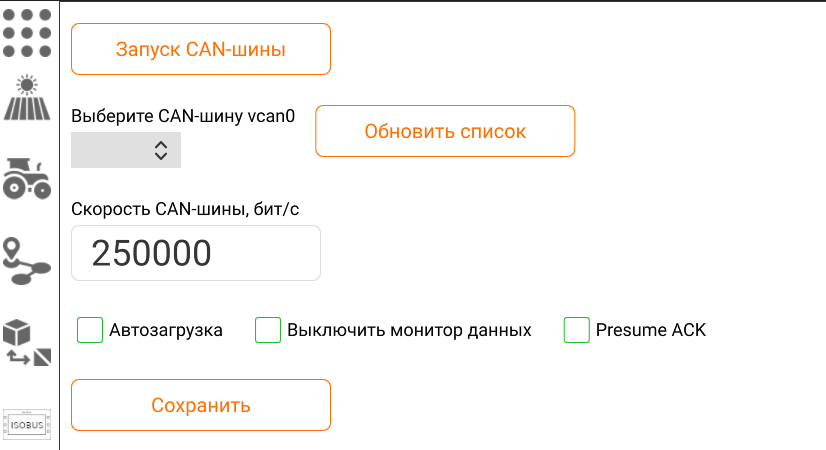
На странице настроек нажмите кнопку "Запуск CAN-шины", далее кнопку "Обновить список" - после этого в списке появится список доступных CAN-шин. Выберите из списка вариант can0. Введить в поле "Скорость CAN-шины" значение 250000, отметьте чекбокс "Автозагрузка" и нажмите кнопку "Сохранить". В случае успешного старта CAN-шины на USB-CAN адаптере загорится синий светодиод
Для подключения BLDC-мотора с отверстием под рулевой вал (например KEYA), управляемого через CAN интерфейс, подключите линии CAN_H, CAN_L драйвера мотора к USB-CAN адаптеру и в выпадающем списке "Драйвер мотора" выберите вариант KEYA